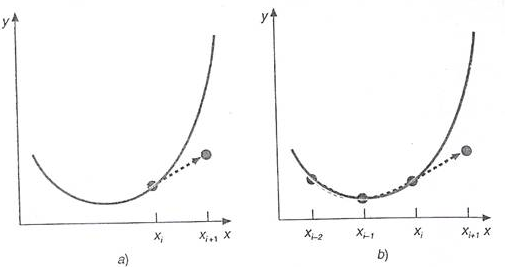
Los métodos de un paso descritos en las secciones anteriores utilizan
información en un solo punto xi para predecir un valor de la variable
dependiente yi+1 en un punto futuro xi+1. Procedimientos alternativos, llamados
métodos multipaso, se basan en el conocimiento de que una vez empezado el
cálculo, se tiene información valiosa de los puntos anteriores y esta a nuestra
disposición. La curvatura de las líneas que conectan esos valores previos
proporciona información con respecto a la trayectoria de la solución. Los
métodos multipaso que exploraremos aprovechan esta información para resolver
las EDO. Antes de describir las versiones de orden superior, presentaremos un
método simple de segundo orden que sirve para demostrar las características
generales de los procedimientos multipaso.

Observe
la ecuación ec. 2 alcanza
) a expensas de emplear un tamaño de paso mas grande, 2h.
Además, observe que la ecuación ec. 1 no es de autoinicio, ya que involucra un
valor previo de la variable dependiente yi-1. Tal valor podria no estar
disponible en un problema común de valor inicial. A causa de ello, las
ecuaciones 26.11 y 26.12 son llamadas método de Heun de no autoinició.
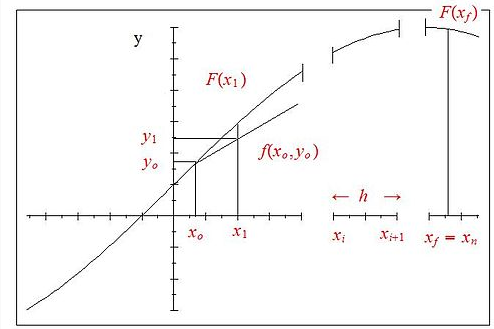
Como se ilustra en la figura 26.4, la derivada estimada de la ecuación 26.12 se
localiza ahora en el punto medio mas que al inicio del intervalo sobre el cual
se hace la predicción. Como se demostrara después, esta ubicación centrada
mejora el error del predictor a
Sin embargo, antes de proceder a una deducción formal
del método de Heun de no autoinicio, resumiremos el método y lo expresaremos
usando una nomenclatura ligeramente modificada:



La
ecuación se puede aplicar de manera iterativa hasta que Ea esté por debajo de
un valor pre especificado de Es. Como fue el caso con el método de Heun, las
iteraciones convergen sobre un valor de 6.360865. Sin embargo, como el valor
del predictor inicial es más exacto, el método de multipaso converge una razón
algo más rápida.
Para el segundo paso, el predictor es:
Para el segundo paso, el predictor es:

Que
es superior a la predicción de 12.08260 que fue calculada con el método de Heun
original. El primer corrector da 15.76693 e iteraciones subsecuentes convergen
sobre el mismo resultado como se obtuvo con el método de Heun de autoinicio:
15.30224. Como con el paso anterior, la razón de convergencia del corrector ha
sido mejorada debido a la mejor predicción inicial.
Deducción y análisis del error de las formulas del predictor-corrector. Ya
empleamos conceptos
gráficos
para deducir el Heun de no autoinicio. Ahora mostraremos como las mismas
ecuaciones se pueden deducir matemáticamente. Esta deducción es en particular
interesante porque vincula las ideas del ajuste de curva, de la integración
numéricas y de las EDO. El ejercicio también es útil porque proporciona un
procedimiento simple para desarrollar métodos de multipaso de orden superior y
estima sus errores.
La deducción se basa en resolver la EDO general:
La deducción se basa en resolver la EDO general:

La ecuación representa una solución a la EDO si la integral puede ser
evaluada. Es decir, proporciona un medio para calcular un nuevo valor de la
variable dependiente
con base en un valor previo de
y la ecuación diferencial.
Las formulas de integración numérica proporcionan una manera de hacer esta evaluación. Por ejemplo, la regla trapezoidal se puede usar para evaluar la integral, como en:
Las formulas de integración numérica proporcionan una manera de hacer esta evaluación. Por ejemplo, la regla trapezoidal se puede usar para evaluar la integral, como en:


El cual es el predictor para el Heun de no autoinicio. Como con el
corrector, el error de truncamiento local se puede tomar directamente:

Donde el subíndice p designa que este es el error dele predictor.
Así, el predictor y el corrector para el método de Heun de no autoinicio tiene errores de truncamiento del mismo orden. Además de actualizar la exactitud del predictor, este hecho tiene beneficios adicionales relacionados con el análisis del error, como se elaborara en la siguiente sección.
Estimación de errores: Si el predictor y el corrector de un método multipaso son del mismo orden, el error de truncamiento local puede estimarse durante el curso de un cálculo. Esto es una tremenda ventaja, ya que establece un criterio para el ajuste del tamaño de paso.
El error de truncamiento local para el predictor se estima con la ecuación ec.9. Dicho error estimado se puede combinar con el estimado de
del paso predictor para dar:
Así, el predictor y el corrector para el método de Heun de no autoinicio tiene errores de truncamiento del mismo orden. Además de actualizar la exactitud del predictor, este hecho tiene beneficios adicionales relacionados con el análisis del error, como se elaborara en la siguiente sección.
Estimación de errores: Si el predictor y el corrector de un método multipaso son del mismo orden, el error de truncamiento local puede estimarse durante el curso de un cálculo. Esto es una tremenda ventaja, ya que establece un criterio para el ajuste del tamaño de paso.
El error de truncamiento local para el predictor se estima con la ecuación ec.9. Dicho error estimado se puede combinar con el estimado de































{kind=link}